A* Maze Solver
I started this project as a fun and simple experiment to learn more about computer science algorithms.
Methods
For a basic path finding algorithm the main idea is to weigh the different possibilities and create a cost function based on weights. A* uses this same concept, but uses a heuristic function which adds to the cost for each path.
\[f(n) = g(n) + h(n)\]This project uses a basic euclidean distance for the heuristic function.
\[h(n) = \sqrt{\Delta x^2 + \Delta y^2}\]This heuristic function the algorithm can easily prioritize the more valuable path moving towards the goal, and increases the search speed.
Generating Obstacles
For creating more complex paths for the algorithm to choose between I added two main options:
- Random Blockades (problematic)
- Prim’s Maze
The random option gives a quick and easy method of making a unique path, but depending on what type of obstacle density is give a solution may not always be available.
A more interesting option is the Prim’s Maze algorithm. This method ensures a path will always be available, but does create a much easier solution for the A* method.
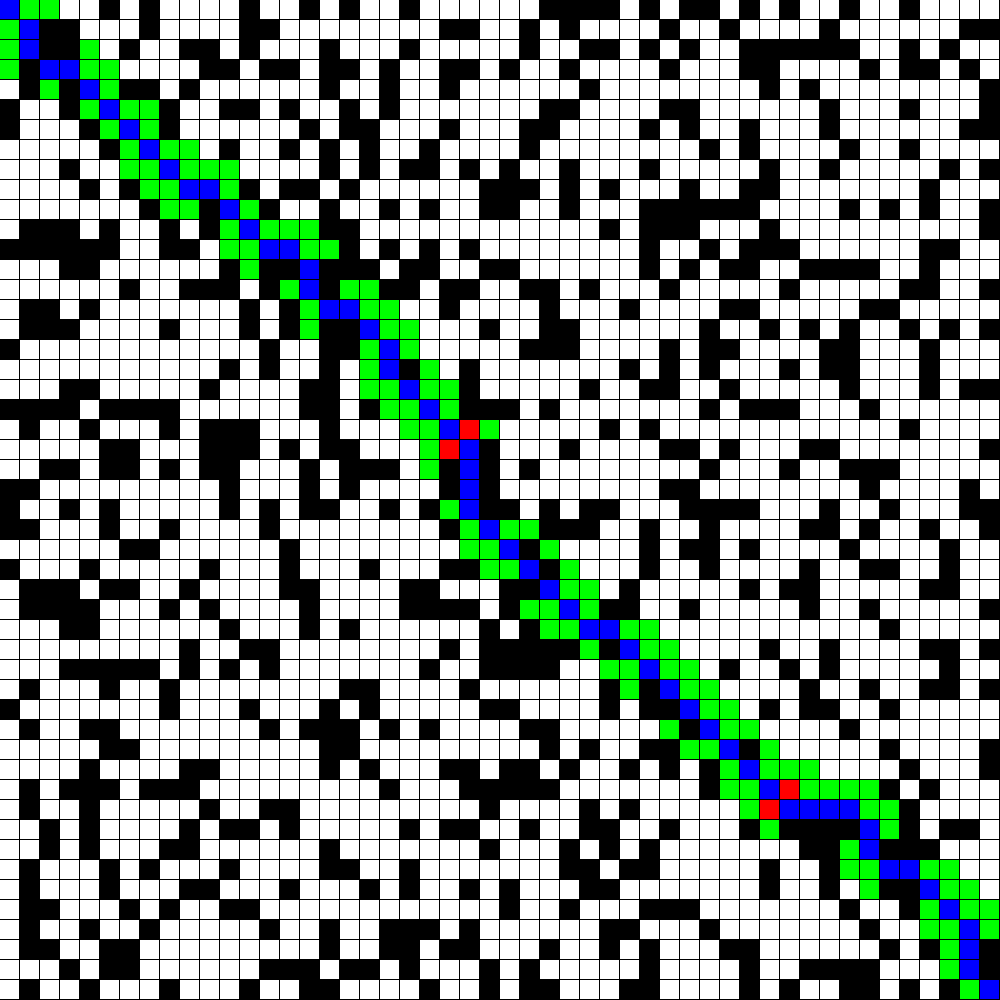
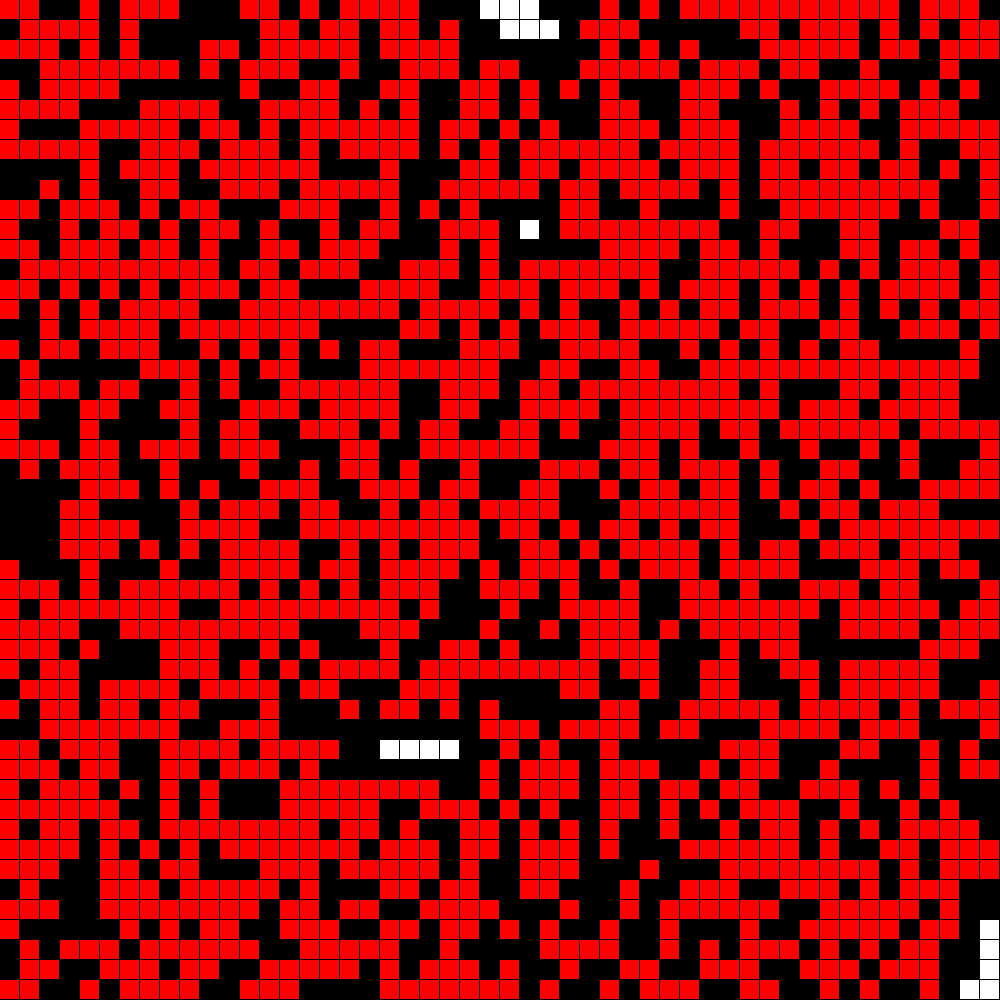
Results
Here are the results from the project. For a display method I used the python package PyGame. The left image shows the A* path with a found solution. Red cells represent the closed set, while the green show the openset at the time of finding a solution. The right image is an example of the randomized obstacle generation creating a grid with no solution. This example shows one of the main drawbacks to the A* algorithm, memory use. All red cells represent a closed set spot object. For the situation here this problem is not significant, but for situations that required massive searches A* can become problematic because of the memory requirements.